capteur à ultrasons HC-SR04 avec Arduino Tutorial
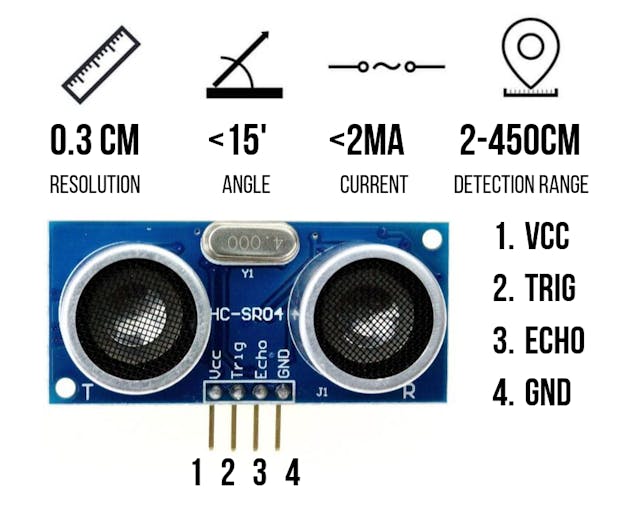
Capteur à ultrasons HC-SR04 est un capteur qui peut mesurer la distance. Il émet une échographie à 40 000 Hz (40 KHz) qui se déplace dans l’air et s’il y a un objet ou un obstacle sur son chemin, il rebondira vers le module. Compte tenu du temps de trajet et de la vitesse du son, vous pouvez calculer la distance.,
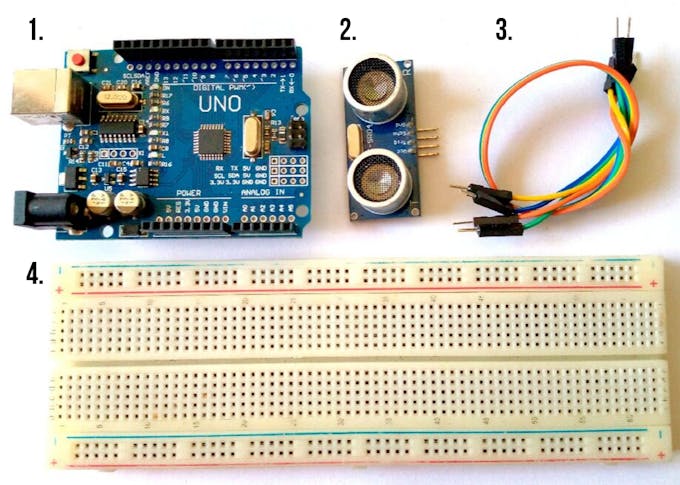
The materials that we need to make this project:
1. Arduino UNO R3 CH340 (you can use any Arduino Boards)
2. Ultrasonic Sensor HC-SR04
3. Male to Male Jumper Wires
4., Breadboard
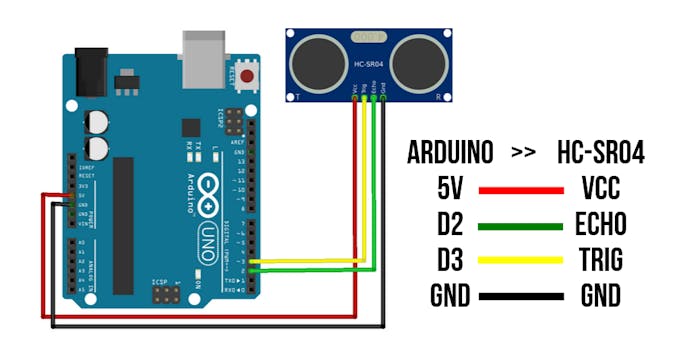
The connection of Arduino and Ultrasonic Sensor HC-SR04
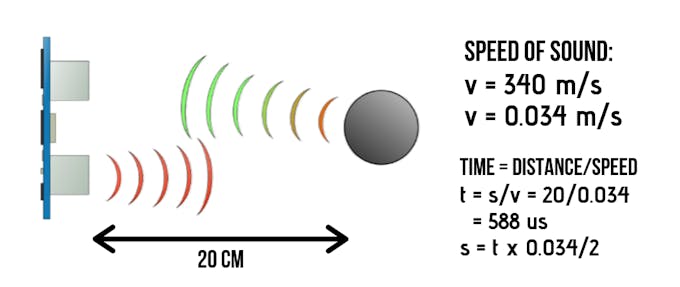
In order to generate the ultrasound we need to set the Trigger Pin on a High State for 10 µs., Cela enverra une rafale sonique de 8 cycles qui voyagera au son de vitesse et il sera reçu dans la broche D’écho. La Broche Echo affichera le temps en microsecondes parcouru par l’onde sonore.
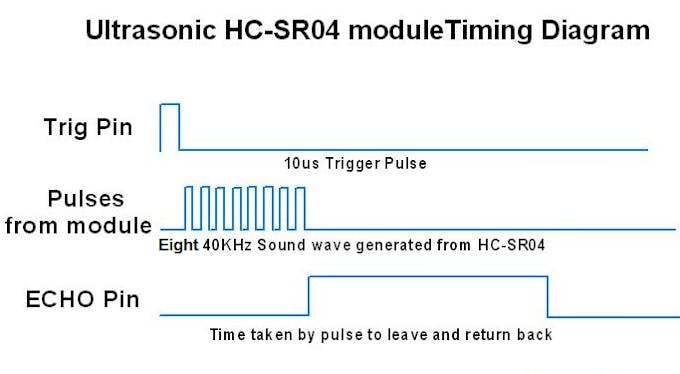
Par exemple, si l’objet est à 20 cm de distance entre le capteur et la vitesse du son est de 340 m/s ou 0.034 cm/µs, l’onde sonore aurez besoin de voyager sur 588 microsecondes., Mais ce que vous obtiendrez de la broche Echo sera le double de ce nombre car l’onde sonore doit avancer et rebondir vers l’arrière. Donc, pour obtenir la distance en cm, nous devons multiplier la valeur de temps de trajet reçue de la broche echo par 0,034 et la diviser par 2.
Pour le code de programmation, nous devons d’abord définir le Déclenchement de la Broche et de l’Écho de code Pin qui connecté à l’Arduino., Dans ce projet EchoPin est attaché à D2 et TrigPin à D3. Ensuite, définissez des variables pour la distance (int) et la durée (long).
dans la boucle, vous devez d’abord vous assurer que le trigPin est clair, nous devons donc définir cette broche sur un état bas pour seulement 2 µs. Maintenant, pour générer l’onde ultrasonore, nous devons régler le trigPin à L’état élevé pour 10 µs. En utilisant la fonction pulseIn (), vous devez lire le temps de trajet et mettre cette valeur dans la variable « durée”. Cette fonction a 2 paramètres, le premier est le nom de la broche echo et pour le second, vous pouvez écrire haut ou bas., Dans ce cas, HIGH signifie que la fonction pulseIn () attendra que la broche soit haute causée par l’onde sonore rebondie et qu’elle commence à chronométrer, puis elle attendra que la broche soit basse lorsque l’onde sonore se terminera, ce qui arrêtera la synchronisation. À la fin, la fonction renverra la longueur de l’impulsion en microsecondes. Pour obtenir la distance, nous multiplierons la durée par 0,034 et la diviserons par 2 comme nous l’avons expliqué précédemment. À la fin, nous imprimerons la valeur de la distance sur le moniteur série.
Mesures :
1. D’abord faire le câblage comme indiqué dans l’image
2., Ouvrez le logiciel Arduino Arduino et notez votre code, ou téléchargez le code ci-dessous et ouvrez-le
3. Choisissez votre propre carte Arduino (dans ce cas Arduino Uno), en sélectionnant Outils > Conseil > Arduino/Geniuno Uno
5. Téléchargez votre code en appuyant sur Ctrl + U ou Esquisse > Télécharger
6.,iv id= »df6b92d1a8″>
Results:
After uploading the code, display the data with Serial Monitor., Maintenant, essayez de donner un objet devant le capteur et de voir la mesure.

Pour l’examen, vous pouvez utiliser votre manuel mètre à ruban pour mesurer la distance et de la comparer avec la distance sur le Moniteur de Série. Si vous voulez l’afficher sur l’écran LCD, vous pouvez suivre le deuxième schéma de câblage et télécharger le code ci-dessous.