ultrahangos érzékelő HC-SR04 Arduino Tutorial
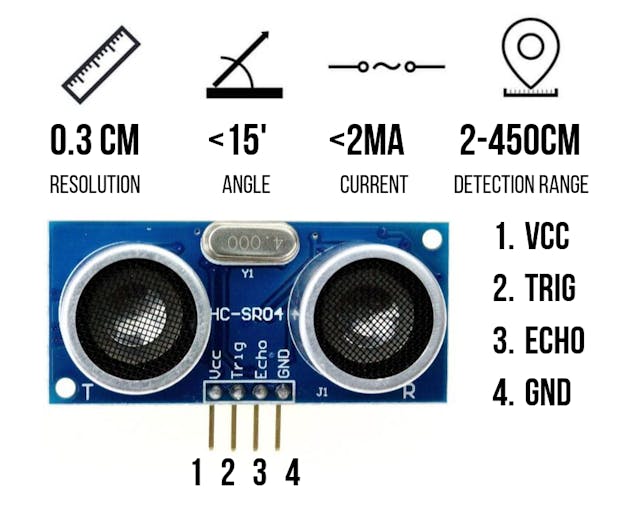
ultrahangos érzékelő HC-SR04 egy érzékelő, amely képes mérni a távolságot. Ultrahangot bocsát ki 40 000 Hz-en (40kHz), amely áthalad a levegőben, és ha egy tárgy vagy akadály van az úton, akkor visszapattan a modulhoz. Figyelembe véve az utazási időt és a hang sebességét, kiszámíthatja a távolságot.,
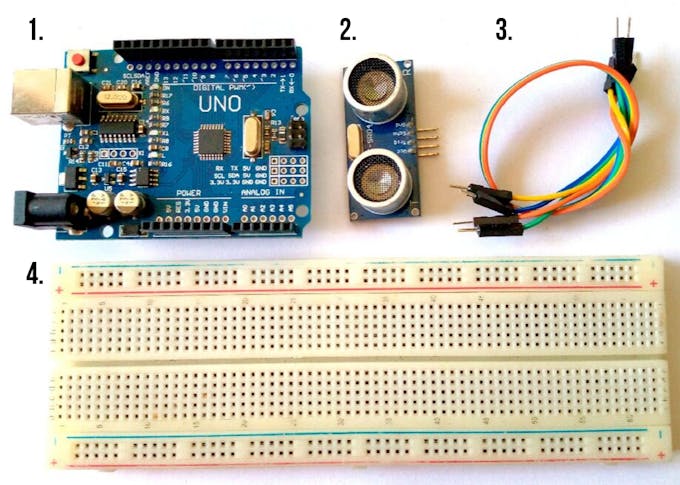
The materials that we need to make this project:
1. Arduino UNO R3 CH340 (you can use any Arduino Boards)
2. Ultrasonic Sensor HC-SR04
3. Male to Male Jumper Wires
4., Breadboard
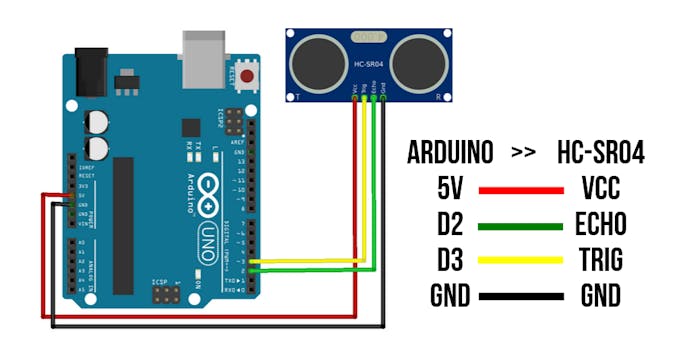
The connection of Arduino and Ultrasonic Sensor HC-SR04
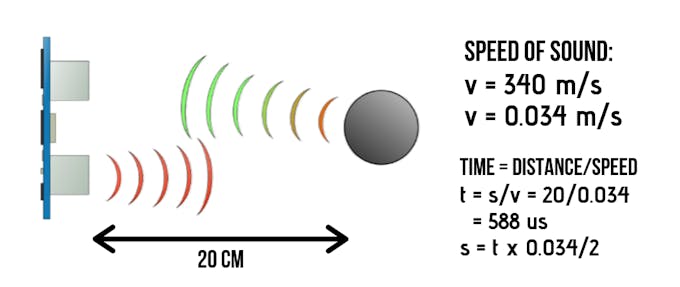
In order to generate the ultrasound we need to set the Trigger Pin on a High State for 10 µs., Ez egy 8 ciklusú hangrobbanást küld, amely a sebesség hangjával halad, és az Echo Pin-kódban lesz fogadva. Az Echo Pin az időt mikroszekundumban adja ki a megtett hanghullám.
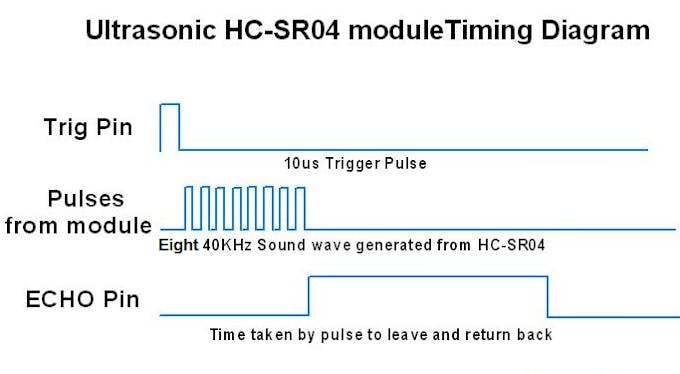
például, ha az objektum 20 cm-re a szenzor, valamint a sebesség a hang 340 m/s, vagy 0.034 cm/µs a hanghullám kell utazni 588 mikroszekundum., De amit az Echo pin-kódból kapsz, az duplája lesz ennek a számnak, mert a hanghullámnak előre kell haladnia, vissza kell ugrálnia. Tehát ahhoz, hogy cm-ben elérjük a távolságot, meg kell szoroznunk a kapott utazási idő értékét az echo pin-kódból 0,034-gyel, majd el kell osztanunk 2-vel.
a programozási kódot, először is meg kell, hogy határozza meg a Ravaszt Pin-kódot, majd az Echo Pin, hogy csatlakozik Arduino board., Ebben a projektben az EchoPin a D2-hez, a TrigPin pedig a D3-hoz kapcsolódik. Ezután határozza meg a távolság (int) és az időtartam (hosszú) változóit.
a hurokban először meg kell győződnie arról, hogy a trigPin tiszta, ezért ezt a csapot alacsony állapotban kell beállítanunk mindössze 2 µs-re. Most az ultrahanghullám generálásához a trigpint magas állapotba kell állítanunk 10 µs-ra. A pulseIn () függvény használatával el kell olvasnia az utazási időt, majd ezt az értéket az “időtartam”változóba kell helyeznie. Ez a funkció 2 paraméterrel rendelkezik, az első az echo pin neve, a második pedig magas vagy alacsony., Ebben az esetben a magas azt jelenti, hogy a pulseIn() funkció megvárja, amíg a tű magasra emelkedik, amit a visszapattant hanghullám okoz, és elkezdi az időzítést, majd megvárja, amíg a tű alacsony lesz, amikor a hanghullám véget ér, ami leállítja az időzítést. A végén a funkció visszaadja az impulzus hosszát mikroszekundumban. A távolság eléréséhez az időtartamot 0,034-gyel megszorozzuk, majd 2-vel osztjuk meg, amint ezt az egyenletet korábban kifejtettük. A végén kinyomtatjuk a távolság értékét a Soros monitoron.
lépések:
1. Először végezze el a vezetékeket a képen látható módon
2., Nyissa meg az Arduino IDE szoftvert, írja le a kódot, vagy töltse le az alábbi kódot, majd nyissa meg
3. Válassza ki a saját Arduino tábla (ebben az esetben Arduino Uno), kiválasztásával eszközök > Board > Arduino / Geniuno Uno
5. Töltse fel a kódot a Ctrl + U vagy vázlat megnyomásával > feltöltés
6.,iv id=”df6b92d1a8″>
Results:
After uploading the code, display the data with Serial Monitor., Most próbáljon meg egy tárgyat adni az érzékelő előtt, majd nézze meg a mérést.

a figyelmet, használhatja a kézi kazetta mérő méri a távolságot, majd hasonlítsa össze a távolság a Soros Monitor. Ha LCD-n szeretné megjeleníteni, kövesse a második kapcsolási rajzot, majd töltse fel az alábbi kódot.