超音波センサHC-SR04with Arduino Tutorial
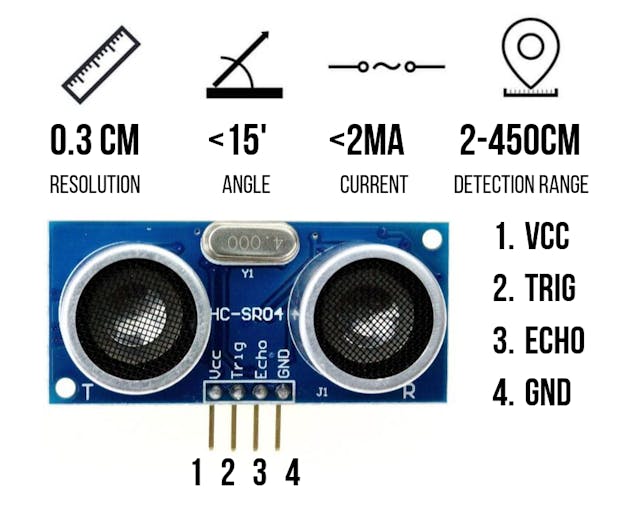
超音波センサHC-SR04は、距離を測定できるセンサです。 それは空気を通って移動する40の000のHz(40kHz)で超音波を出し、道に目的または障害があればモジュールに跳ね返ります。 移動時間と音の速度を考慮すると、距離を計算することができます。,
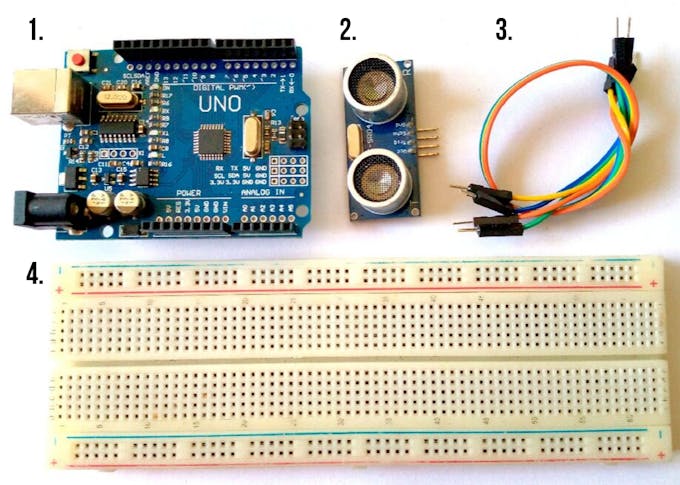
The materials that we need to make this project:
1. Arduino UNO R3 CH340 (you can use any Arduino Boards)
2. Ultrasonic Sensor HC-SR04
3. Male to Male Jumper Wires
4., Breadboard
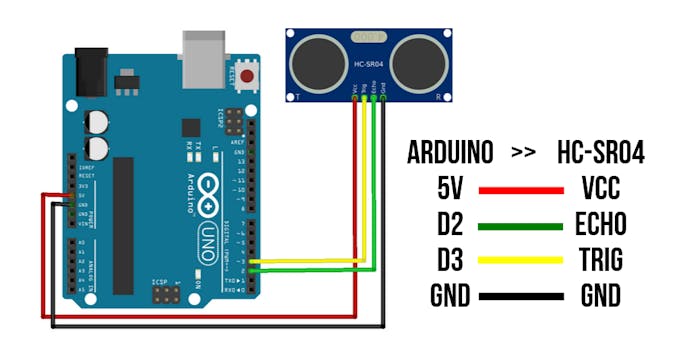
The connection of Arduino and Ultrasonic Sensor HC-SR04
In order to generate the ultrasound we need to set the Trigger Pin on a High State for 10 µs., それは速度の音で移動し、エコーピンで受け取られる8周期の音波の破烈を送り出します。 Echoピンは、音波が移動した時間をマイクロ秒単位で出力します。
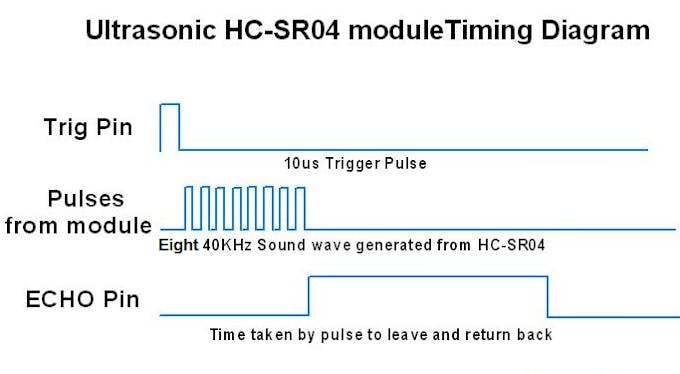
となっています。figcaption>超音波HC-SR04タイミング図
例えば、オブジェクトが、20センチのセンサーの速度や音340m/sまたは0.034cm/µsの音波必要なものを旅行で約588マイクロ秒単位., しかし、エコーピンから得られるものは、音波が前方に移動して後方に跳ね返る必要があるため、その数の倍になります。 したがって、距離をcm単位で取得するには、echoピンから受信した移動時間の値に0.034を掛け、それを2で割る必要があります。
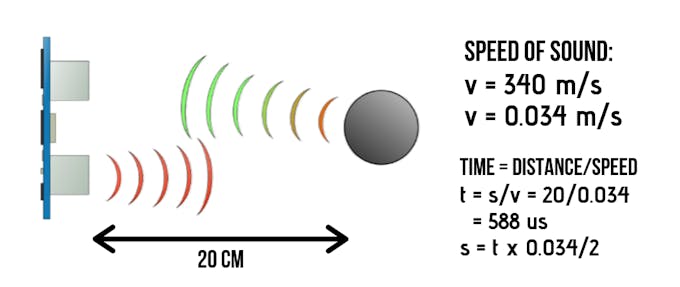
となっています。figcaption>距離計算
となっています。p>プログラミングのコードでは、まず最初に定義する必要がありトリガピンエコーピンを接続Arduinoます。, このプロジェクトでは、EchoPinはD2に、TrigPinはD3に取り付けられています。 次に、距離(int)と期間(long)の変数を定義します。
ループでは、最初にtrigPinがクリアであることを確認する必要があるため、そのピンをわずか2µsのロー状態に設定する必要があります。 ここで、超音波を生成するために、trigPinを10µsのHIGH状態に設定する必要があります。 PulseIn()関数を使用すると、移動時間を読み取り、その値を変数”duration”に入れる必要があります。 この関数には2つのパラメータがあり、最初のものはエコーピンの名前であり、二番目のものはハイまたはローのいずれかを書くことができます。, この場合、HIGHは、pulseIn()関数がバウンスされた音波によってピンがハイになるのを待ち、タイミングを開始し、音波が終了するとピンがローになるのを待ち、タイミングを停止することを意味します。 最後に、関数はパルスの長さをマイクロ秒単位で返します。 距離を取得するために、この式を前に説明したように、期間に0.034を掛け、2で割ります。 最後に、シリアルモニターに距離の値を印刷します。
ステップ:
1. まず、写真に示すように配線を行います
2。, Arduino IDEソフトウェアを開いてコードを書き留めるか、以下のコードをダウンロードして開きます
3. ツールを選択して、独自のArduinoボード(この場合はArduino Uno)を選択します>ボード>Arduino/Geniuno Uno
5. Ctrl+UまたはSketch>Upload
6を押してコードをアップロードします。,iv id=”df6b92d1a8″>